- UID
- 9
- 好友
注册时间2007-3-31
威望值 点
最后登录1970-1-1
激情值 点
积分6855
认证分 分
齿轮币 枚
回帖0
|

楼主 |
发表于 2013-7-23 09:07
|
显示全部楼层
针对侧隙的计算,单独开了一个帖子。
http://www.gearbbs.net/thread-166568-1-1.html
***************
为了资料集中,将这个帖子的内容转到此处!
****************
从网上看,很多人都注意到齿轮副的侧隙计算及其分配问题。这个问题看似简单,但是国内少有资料介绍,而相关标准的定义在符号上又有不同之处,因此计算比较容易搞混了!
下面将给出不同文献、标准及软件中的相关算法,并用MathCAD来验算这些参数之间的对比!
关于侧隙的定义,不同标准有点不同,首先给出ISO /TR 10064-2标准给出的定义:
5 天前 上传
下载附件 (541.27 KB)
***************
注意这个标准中的定义与符号。
按照ISO/TR 10064标准给出的定义,基于侧隙的极限值应该是考虑极限状态下的计算得出,具体表述如下:
【1】对外齿轮副,当两齿轮的中心距最小,齿厚最大时,产生最小的侧隙 jbn_min, jwt_min, jr_min;反之,当中心距最大,齿厚最小小时,产生最大侧隙jbn_max, jwt_max, jr_max。
【2】对内齿轮副,(注:此处的中心距符号是按ISO 21771:2007标准定义,与DIN 3960:1987标准的定义是不同的),当两齿轮中心距最大,齿厚最大(注:内齿的齿厚是实体凹齿,而不是齿槽!)产生最小的侧隙 jbn_min, jwt_min, jr_min;反之,当中心距最小,齿厚最小小时,产生最大侧隙jbn_max, jwt_max, jr_max。
***************
注意这些符号的定义,是按照ISO 21771:2007标准规定的,ISO 21771标准除了对内齿的齿数定义为负数,变位系数定义与国内相反外,其他参数的数值是一致的;
ISO 21771标准对内齿的齿数与变位系数符号与DIN 3960:1987标准一致,但是除了这两个参数的符号一致,其余的不采用符号表达,通过绝对值转化成正值,反而与国内的目前数值是一致的!
在ISO 21771:2007标准中,给出了侧隙的定义及其换算公式。
这其中涉及的侧隙符号有:jbn, jwt,jt, jr。
注意这些符号的定义,因为这与DIN 3960标准不同的!
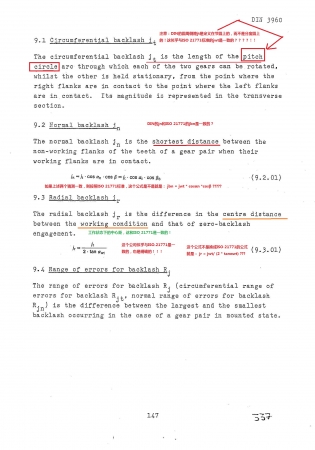
【1】jbn:非工作齿面的最短距离;
【2】jwt:节圆上转动的弧长;
【3】jt:分度圆上转动的弧长;
【4】jr:在给定中心距状态下,齿轮副达到0侧隙式使得径向移动量。jr与jwt之间的换算是精确的公式,下图中给标出来了,看红色地方!
5 天前 上传
下载附件 (1.26 MB)
5 天前 上传
下载附件 (1.26 MB)
|
|
|
|


 [复制链接]
[复制链接]





 发表于 2013-7-8 15:32
发表于 2013-7-8 15:32