手机号码,快捷登录
woodee 发表于 2024-3-16 17:04 进行不同的等效计算变换,是为了搞清楚齿面的工作部位直径范围。 通过节圆相切法进行反推计算,我们 ...
举报
DD99 发表于 2024-3-16 19:18 是的。您解释的有道理。其实两种方法我都算了,确实两种使用的螺纹升角是相差不多的。
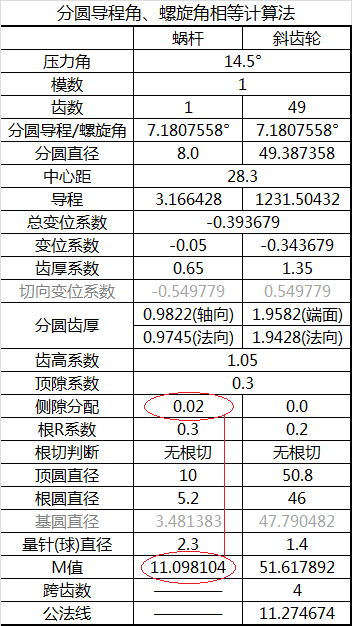
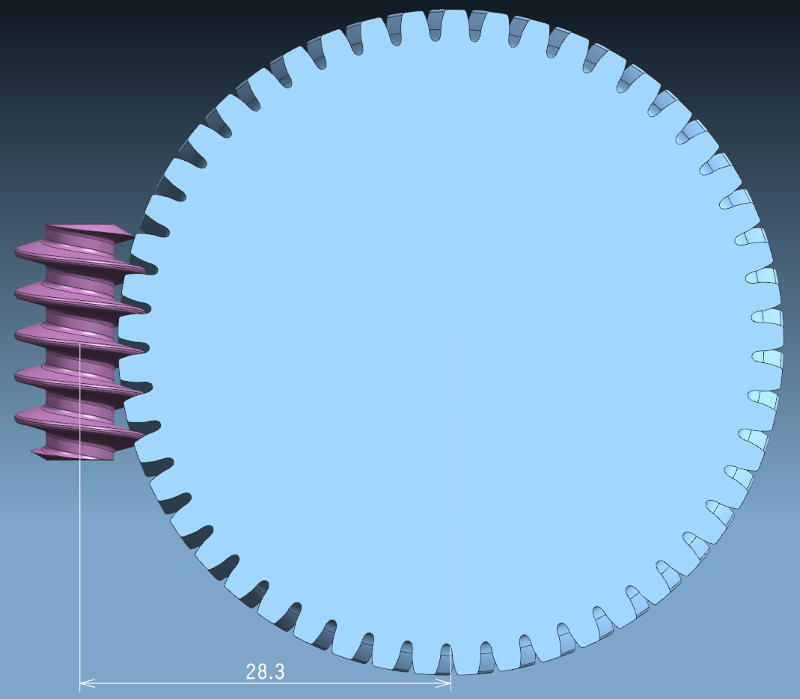
woodee 发表于 2024-3-17 21:51 现在我们在回到一楼参数表所设定的模型。
DD99 发表于 2024-3-18 09:28 根据您的计算表数据作出来的模型与您分析的都没有问题。
JINLIANG 发表于 2024-3-20 10:34 我设计原则:蜗杆不变位。蜗杆变位相当于一改变模数及压力角的另一个不变的蜗杆(基圆相等),斜齿轮为凑中 ...
henrymao 发表于 2024-3-14 14:11 蜗杆不变,中心距拉到30.5,用两个方法分别配一个斜齿轮,可以看出哪个算法更好
woodee 发表于 2024-3-21 15:54 中心距与初始中心距偏差太多,无论是分圆相等法,还是节圆相切法,都不是好的设计。 如果按矛老师 ...
本版积分规则 发表回复 回帖后跳转到最后一页
|小黑屋|手机版|Archiver|齿轮论坛
GMT+8, 2024-4-29 07:07 , Processed in 0.229378 second(s), 13 queries , MemCache On.
Powered by Discuz! X3.4 Licensed
© 2001-2023 Discuz! Team.



 发表于 2024-3-16 19:18
发表于 2024-3-16 19:18
 楼主
楼主